
Developing the Robot Controller
I am utilising Rust to update the robot/expierment controller, adding extended features and optimising current features.
Aspiring Roboticist
@ Cambridge University

Currently: Pushing dirt with robots!
I hold a first-class MEng Electronic Engineering degree from the University of York (where I was also awarded best MEng graduate). I previously worked in the RF industry and have come to realise that I have a passion for research and robots! I am currently in the second year of my PhD at the University of Cambridge, working alongside my supervisor Jim Hambleton to solve terraforming problems using robots!
This list is not exhaustive.
I have a broad range of interests that aren't academic as well!
For a list of my publications, please click here.
The first year of the PhD is over (already!), I am currently wrapping up some loose ends and looking forwards to the next stages of the research.
I am utilising Rust to update the robot/expierment controller, adding extended features and optimising current features.
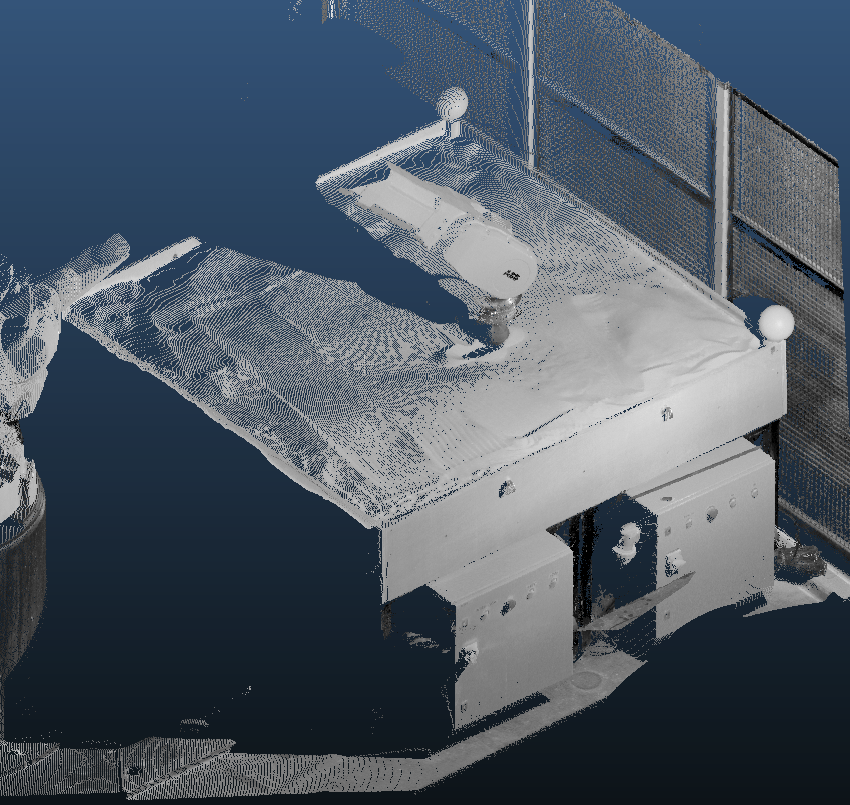
I am currently attempting a Realsense depth camera to measure fluctuations in terrain depth. At the time of writing the camera measures points in realtime and converts them to a heightmap. However, furhter work is required to filter and build confidence in the measurements.
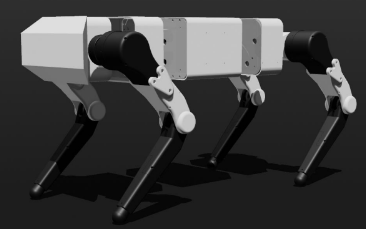
Working alongside a team of PhD researchers, I investigated the effectiveness of specific CPG parameters for locomotion in a one-of-a-kind quadruped robot! Click the image to read it! This also resulted in a conference paper, which can be read here.
This list is also not exhaustive.
Current responsibilities
Previous responsibilities.
Send me an email! I'm happy to talk projects/work or anything interesting.
ji291@cam.ac.uk